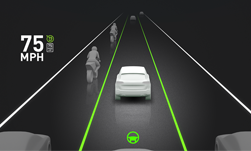
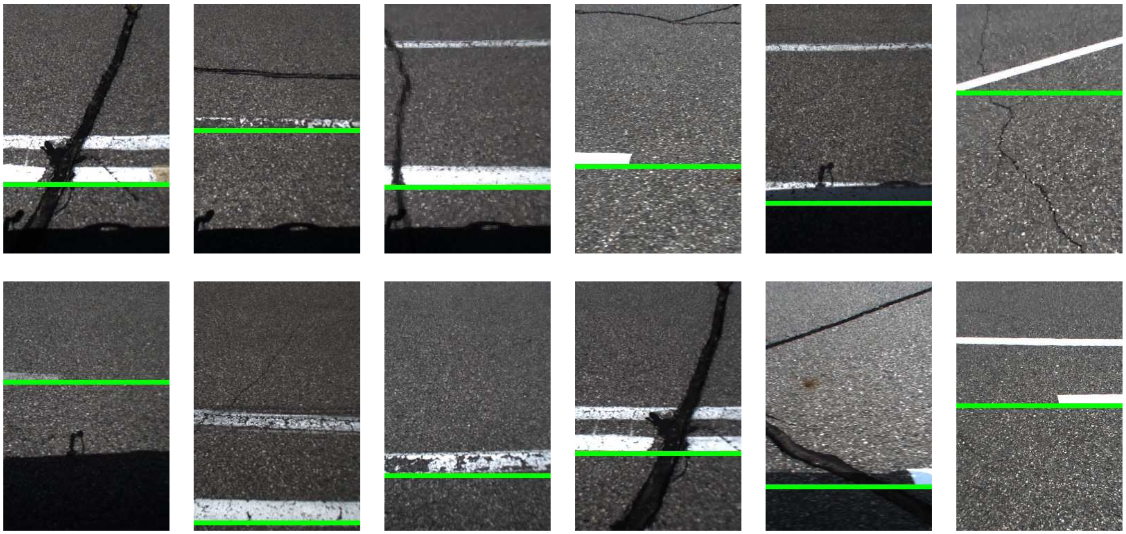
Researchers from the recently expanded Ford Research and Innovation Center in Palo Alto, California developed a new sub-centimeter accurate approach to estimate a moving vehicle’s position within a lane in real-time. To achieve this level of precision the researchers trained a deep neural network, aptly named DeepLanes, to process input images from two laterally-mounted down-facing cameras – each recording at an average 100 frames/s.
The team trained their neural network on an NVIDIA DIGITS DevBox with the cuDNN-accelerated Caffe deep learning framework.
“Our unified framework approach is a simple, end-to-end solution that does not depend on tedious pre-processing, post-processing or hand-crafted features,” says the team of researchers. But it was only after a thorough evaluation of the results that they could proudly claim, “we are able to estimate the lane position in 99% of the cases with less than five pixel error”.
In the coming years the team expects their speedy and scalable DeepLanes technique can be applied to a variety of other automotive functions as well – anything from improved real-time navigation systems to fully automated driving features.
Read more >>
Ford Using Deep Learning for Lane Detection
Jun 28, 2016
Discuss (0)

Related resources
- GTC session: Revolutionizing Industrial Fluid Dynamics with Advanced Deep Learning Techniques
- GTC session: Accelerating the Shift to AI-Defined Vehicles
- GTC session: Reward Fine-Tuning for Faster and More Accurate Unsupervised Object Discovery
- NGC Containers: MATLAB
- SDK: cuVSLAM
- Webinar: Accelerate AV Development with DGX Cloud and NVIDIA AI Enterprise