Creating detailed maps is an expensive, time-consuming process.
To help improve GPS navigation in places with limited map data, MIT researchers in collaboration with the Qatar Computing Research Institute developed a deep learning model that can automatically enhance existing maps.
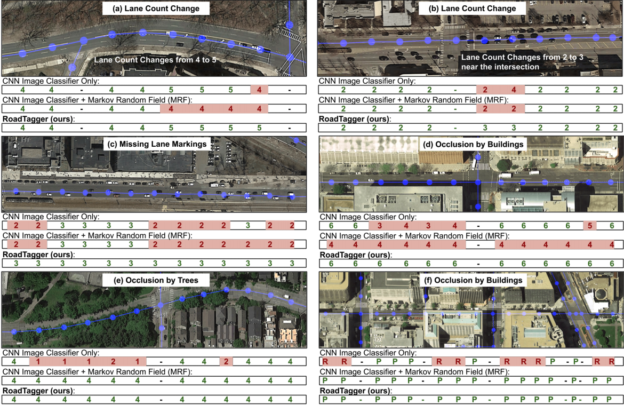
RoadTagger, as the model is called, can use satellite imagery to predict the number of lanes and road types behind obstructions, such as trees, buildings, or clouds.
“Our goal is to automate the process of generating high-quality digital maps, so they can be available in any country,” says Sam Madden, a professor in the Department of Electrical Engineering and Computer Science at MIT. Madden is the co-author of a new research paper about the work, RoadTagger: Robust Road Attribute Inference with Graph Neural Networks.
Using a combination of convolutional neural networks (CNN) and graph neural networks (GNN), the models can count lane numbers with 77% accuracy and infer road types with 93% accuracy.
The team trained their models on real-world and synthetic data using NVIDIA V100 GPUs for both training and inference with the cuDNN-accelerated TensorFlow deep learning framework.
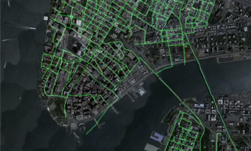
“For the real-world dataset, we collect the road attributes (ground truth labels) from OpenStreetMap (Haklay and Weber 2008) and the corresponding satellite imagery through the Google static map API (Google 2019). This dataset covers 688 km2 in 20 U.S. cities,” the researchers explained.
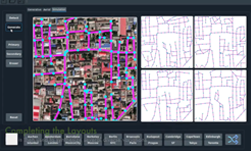
Specifically, the CNN uses the satellite imagery of the target roads as the input, and the GNN breaks the road into 20-meter tiles. Each tile is a separate graph node and the CNN extracts road features, sharing that information with immediate tile neighbors.
“Road information propagates along the whole graph, with each node receiving some information about road attributes in every other node. If a certain tile is occluded in an image, RoadTagger uses information from all tiles along the road to predict what’s behind the occlusion,” the research team explained in a blog post about the work, Using artificial intelligence to enrich digital maps, published on MIT News.
“We believe the RoadTagger framework is a fundamental improvement in road attributes inference and can be easily extended to other road attributes,” the researchers said.
The team plans to use the model to help humans validate and approve modifications to existing datasets such as OpenStreetMap, where maps currently don’t include lane counts or other pertinent details about the roads.
“Roads that were once labeled as dirt roads have been paved over so are better to drive on, and some intersections have been completely built over. There are changes every year, but digital maps are out of date,” says Madden. “We want to constantly update such road attributes based on the most recent imagery.”