Today we release a preview of our next-gen Isaac Sim based on NVIDIA Omniverse.
What’s new with Isaac Sim?
About a year ago NVIDIA released the first iteration of an application called Isaac Sim, a 3D simulation environment designed for use in robot development with the NVIDIA Isaac SDK. The year 2019 was a busy one for the Isaac team, with multiple releases of both Isaac SDK and Isaac Sim. The first Isaac Sim release focused on supporting the LIDAR-based navigation of the ‘Carter’ reference robot was built on the Unreal Engine 4 game engine. The second iteration of Isaac Sim, also known as ‘NavSim’, was based on the Unity engine.
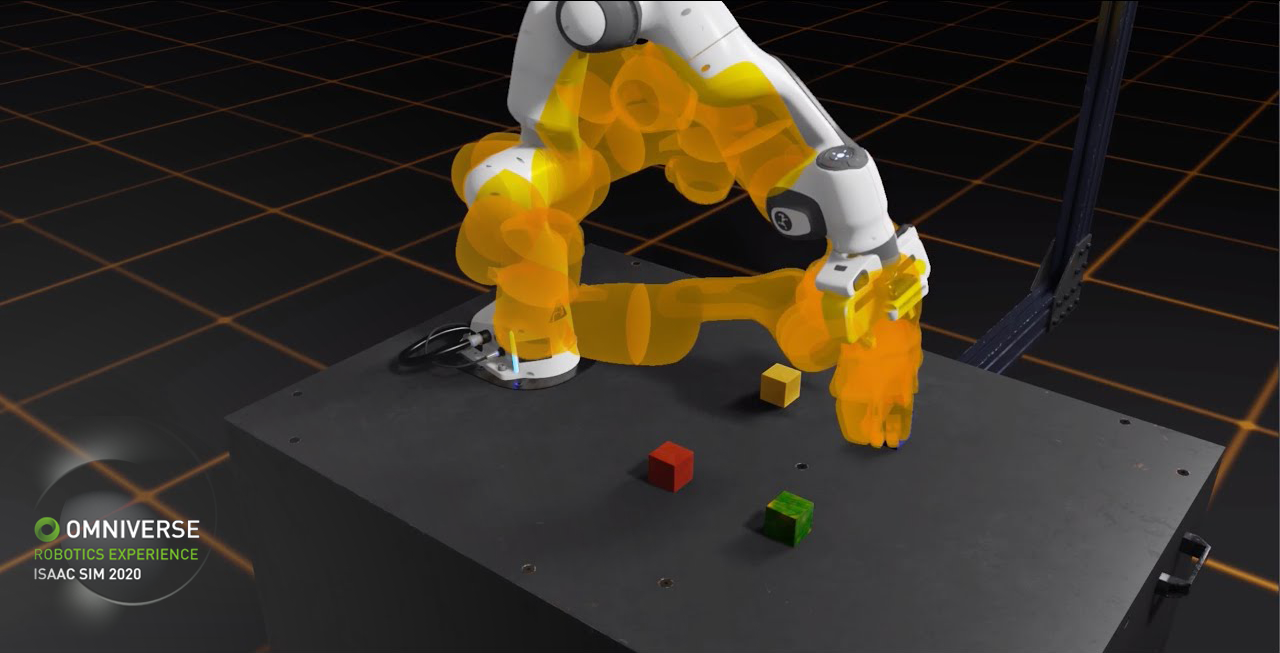
Today NVIDIA’s SimTech team is very excited to offer a preview of our next-generation Isaac Sim built on top of Omniverse Kit, an application and set of tools that harness the power of the NVIDIA Omniverse platform for collaborative simulation workflows. In place of the ‘Carter’ navigation use case of earlier Isaac Sim releases, the 2020.1 Preview focuses on an example manipulation application we call ‘Leonardo’, which was presented recently by NVIDIA’s CEO Jensen Huang in his keynote speech at the GPU Technology Conference in Suzhou, China.
You can learn more about the Leonardo manipulation project and how NVIDIA’s researchers use Isaac Sim from NVIDIA’s Dieter Fox in this video.
In the videos linked above, the Leonardo robot performs tasks like detecting and stacking colored blocks and accepting a block from a person’s hand. Much of the development work, training, and testing for Leonardo were performed with Isaac Sim. The high physical accuracy and visual fidelity offered by Isaac Sim help narrow the gap between the physical Leonardo, which is expressed on a Franka Emika manipulator, and its simulated digital twin.
Isaac Sim: now on Omniverse Kit
Isaac Sim version 2020.1 leverages the powerful Omniverse Kit to build the next generation of robotics simulation. Highlights include:
RTX graphics
- Ray- and path-tracing renderers built for state-of-the-art visual fidelity and high performance.
- Scalable to multiple GPUs, multiple nodes
- Physically-based MDL materials
PhysX 5.0
- Articulation TGS (Temporal Gauss-Seidel) solver for robust multi-joint dynamics.
- GPU physics support
Python user-programmable
- Scripting with USD-based scene management
- APIs for physics, cameras, objects, meshes, materials, and user interface
The Isaac Sim 2020.1 Preview provides examples from the Leonardo project to explore the major features of this next-generation simulation platform. This release is offered as a container that runs on RTX equipped Amazon Web Services (AWS) with streaming to the user’s desktop. This cloud-based delivery provides the latest RTX graphics and performance to any desktop system without requiring local NVIDIA RTX GPUs.
Coming Soon: “Leonardo meets Carter”
Later this year, the Isaac Sim 2020.1 general release will unify simulation support for manipulation and navigation applications built with the Isaac SDK. Tune in to GTC 2020 for more news about Isaac Sim and upcoming releases.