Today NVIDIA announced the availability of Isaac SDK 2019.3 with new simulation capabilities, new DNNs, and much more.
The NVIDIA Isaac Software Development Kit (SDK) is the Industry’s first Robotic AI Development Platform with Simulation, Navigation, and Manipulation. The SDK includes Isaac Engine, high-performance robotics algorithm packages (GEMs), hardware reference applications and Isaac Sim for Navigation, a powerful simulation platform.
The SDK accelerates robot development for manufacturers, researchers, and startups by making it easier to add Artificial Intelligence (AI) for perception and navigation into modern-day robots.
In addition to perception (such as Fiducials, Superpixels, Stereo Depth DNN), navigation capabilities (such as LQR Planner) and UI/UX capabilities (such as speech/audio) introduced in previous releases, Isaac SDK 2019.3 includes the following:
Isaac Sim for navigation
- Sim to Real: Support for Neural Network training in simulation
- Multi-robot simulation with hardware in the loop (HIL) for validation & testing
GPU Accelerated Perception (Isaac GEMs)
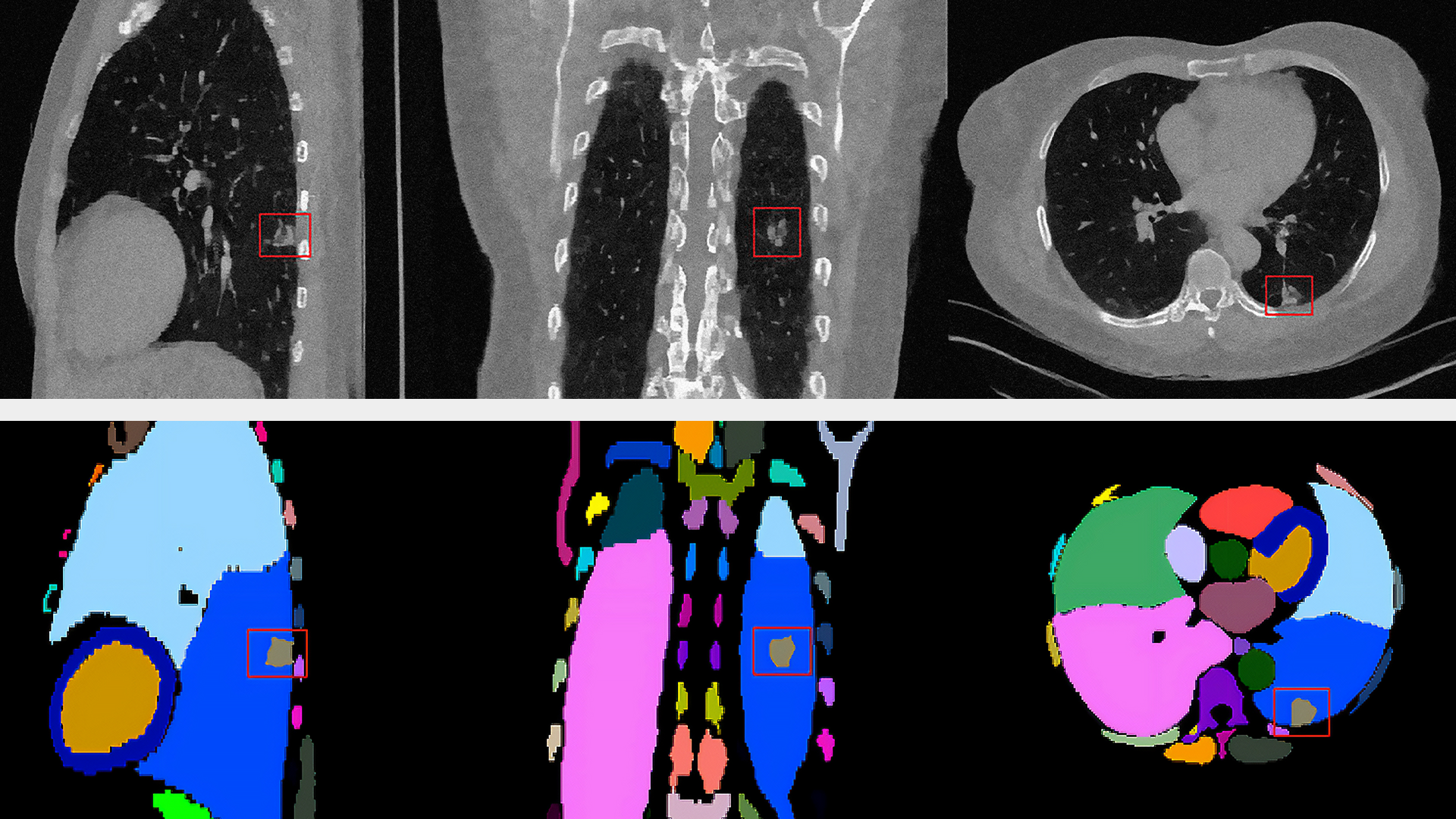
- Multi-class Segmentation DNN
- Object Detection with ResNet (and NVIDIA Transfer Learning Toolkit)
- 3D Object Pose Detection DNN
- Stereo Visual Inertial Odometry
- 2D Skeleton Pose Estimation DNN (OpenPose)
Carter reference applications and platform
- Carter reference hardware and software for indoor navigation

Isaac Engine
- Transfer Learning Toolkit integration
- DeepStream SDK Integration
- C API: Access an Isaac GEM or one of the reference applications directly from another development environment
This new C API introduces expanded modularity and all new use cases. Developers can now embed the Isaac C API inside their own solutions. Isaac applications (which can just be as simple as a single codelet) can be loaded and interacted with via messages which are the primary way Isaac communicates with other codelets, both inside Isaac, and externally.
Isaac SDK 2019.3 and Isaac Sim for Navigation are available now on the Isaac SDK page.
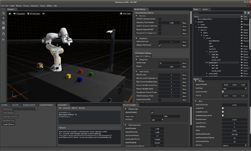
Isaac Sim for Manipulation
Developers working with manipulation robots are invited to sign up for the Isaac Sim for Manipulation Early Access Program to be the first to try out the “Leonardo Preview.” This early access preview is a cloud-based simulator supporting Leonardo, a robotic manipulation research application that performs tasks such as stacking blocks and exchanging physical objects with the user through a virtual agent.
Sign up for the Isaac Sim for Manipulation Early Access Program now!