By Mark Theis, Michael Chacko, Ishan Mitra, Shruthi Jaganathan
While you’re probably used to throwing away your own trash (hopefully), there’s no reason to with modern artificial intelligence (AI).
The Trashformer Team, a group of NVIDIA Jetson interns, created a small humanoid robot that detects and picks up trash autonomously through a neural network model using a Jetson TX2.
 These high school developers started at NVIDIA in June and in only seven weeks built an advanced clean-up machine. All of them have previous experience building robots as part of the FIRST Robotics Competition, but this summer their efforts focused on incorporating AI into a real-world application.
These high school developers started at NVIDIA in June and in only seven weeks built an advanced clean-up machine. All of them have previous experience building robots as part of the FIRST Robotics Competition, but this summer their efforts focused on incorporating AI into a real-world application.
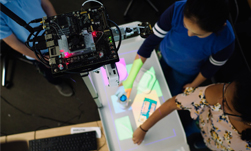
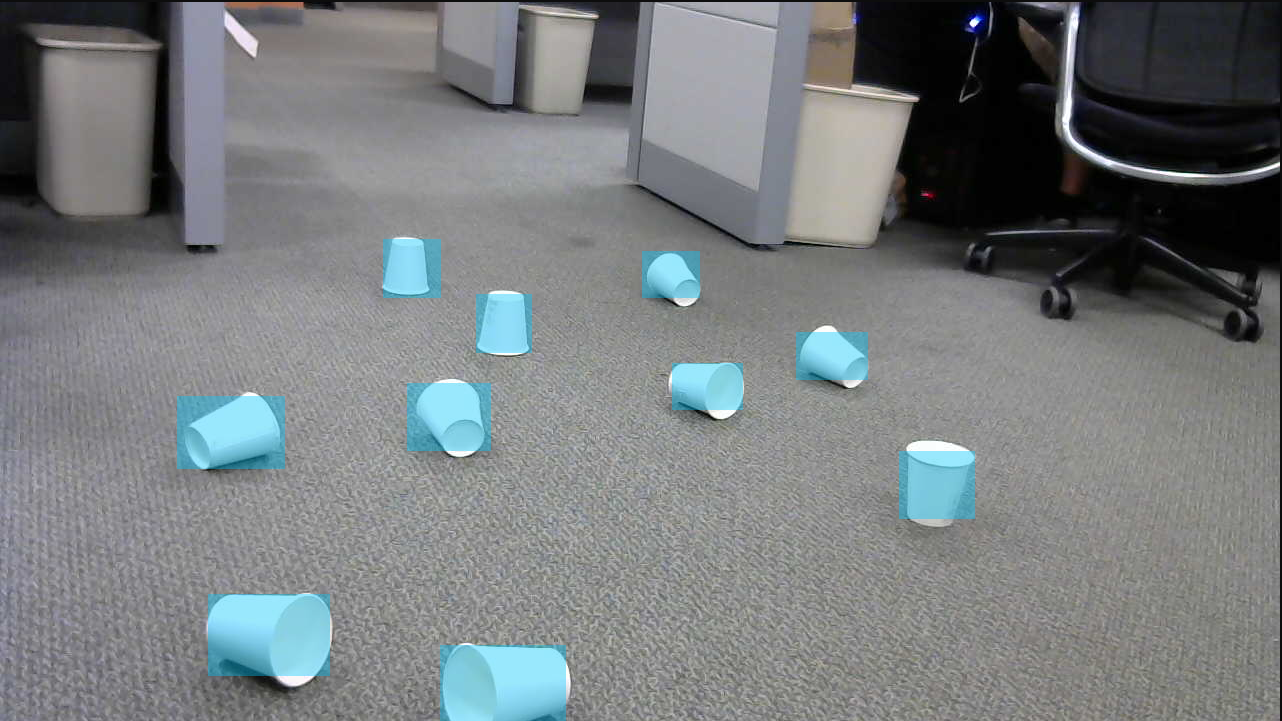
The humanoid robot combines the Jetson TX2 with a Bioloid GP and Logitech webcam. The neural network, named Trashnet, is a multi-class model trained using a Tesla P100 and Quadro P5000 with a cuDNN-accelerated Caffe deep learning framework. It continuously scans the live feed from the webcam and draws bounding boxes around any trash it sees. An array of these bounding boxes is then used to run specific routines. NVIDIA JetPack provides all of the necessary libraries to perform these actions out of the box.
 “Let’s say someone throws a cup on the ground. If it’s in the robot’s field of view, it will walk towards it until the bounding box is out of frame. The model tracks the orientation of the cup, and then starts a pre-programmed routine to pick it up. To prevent false triggers, the pick-up routine only activates if the trash is in the bottom of the frame,” says the Trashformer team.
“Let’s say someone throws a cup on the ground. If it’s in the robot’s field of view, it will walk towards it until the bounding box is out of frame. The model tracks the orientation of the cup, and then starts a pre-programmed routine to pick it up. To prevent false triggers, the pick-up routine only activates if the trash is in the bottom of the frame,” says the Trashformer team.
Watch the robot in action below.
According to the team, this detection technology is easily transferable to other robots.
“Imagine a street cleaning drone, this model could be slightly tweaked and deployed to fit other form factors.” One of the technologies that’s hard to transfer is the motion control, but the ability to simulate and train motion in NVIDIA Isaac will solve that problem.
The Trashformer’s visual network is an accurate method for any robot to spot garbage and the technology may one day eliminate the need for humans to worry about where they put their waste.
Visit the GitHub repo here.
Learn more about the Jetson platform >