Researchers at the Harvard Biorobotics Laboratory are harnessing the power of GPUs to generate real-time volumetric renderings of patients’ hearts. The team has built a robotic system to autonomously steer commercially available cardiac catheters that can acquire ultrasound images from within the heart. They tested their system in the clinic and reported their results at the 2016 IEEE International Conference on Robotics and Automation (ICRA) in Stockholm, Sweden.
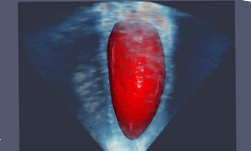
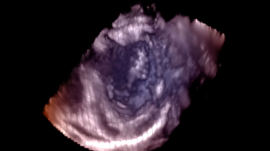
The team used an Intracardiac Echocardiography (ICE) catheter, which is equipped with an ultrasound transducer at the tip, to acquire 2D images from within a beating heart. Using NVIDIA GPUs, the team was able to reconstruct a 4D (3D + time) model of the heart from these ultrasound images.
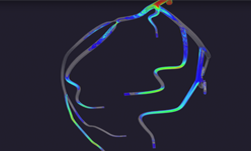
Generating a 4D volume begins with co-registering ultrasound images that are acquired at different imaging angles but at the same phase of the cardiac cycle. The position and rotation of each image with respect to the world coordinate frame is measured using electromagnetic (EM) trackers that are attached to the catheter body. This point cloud is then discretized to lie on a 3D grid. Next, infilling is performed to fill the gaps between the slices, generating a dense volumetric representation of the heart. Finally, the volumes are displayed to the surgeon using volume rendering via raycasting, leveraging the CUDA – OpenGL interoperability. The team accelerated the volume reconstruction and rendering algorithms using two NVIDIA TITAN GPUs.
“ICE catheters are currently seldom used due to the difficulty in manual steering,” said principal investigator Prof. Robert D. Howe, Abbott and James Lawrence Professor of Engineering at Harvard University. “Our robotic system frees the clinicians of this burden, and presents them with a new method of real-time visualization that is safer and higher quality than the X-ray imaging that is used in the clinic. This is an enabling technology that can lead to new procedures that were not possible before, as well as improving the efficacy of the current ones.”
Providing real-time procedure guidance requires the use of efficient algorithms combined with a high-performance computing platform. Images are acquired at up to 60 frames per second from the ultrasound machine. Generating volumetric renderings from these images in real-time is only possible using GPUs.
Read more >>